Halcon SCARA关节机器人手眼标定(眼在手上)例程注解,calibrate_hand_eye_scara_moving_cam.hdev
”halcom手眼标定 halcon halcon_手眼标定 halcon标定 手眼标定例程“ 的搜索结果
勇哥写过许多epson机器人的手眼标定,也有halcon仿制这种方式的实现方法。但是halcon有自己的手眼标定。CalibObjDescr:='calibrate_hand_eye_scara_setup_01_calplate.cpd'CalibrationPlateThickness:=0.0...

丶布布转载注明出处。
基于Halcon的工业机器人手眼标定方法研究田春林1,陈李博1,马国庆1,侯茂盛2,刘涛2【摘要】机器人手眼标定是机器人视觉技术的重要研究内容,基于Halcon所提供的标定板,充分考虑相机镜头径向畸变对手眼标定的影响...
要让机器人的手抓住杯子,就必须知道杯子跟手的相对位置关系,而杯子的位置则是通过机器人的眼睛看见的,所以,我们只需要知道机器人的手和眼睛的转换关系,就可以随时抓取机器人眼睛所看到的物体了。
halcon软件开发包基础上做机器人的手眼标定,涉及许多专业知识,在这些讲义里详细讲解了标定的数学基础,原理等,以及实现手段,3D标定
三维视觉位姿转换原理,多目立体视觉原理,多目相机标定,机器人手眼标定。部分例程基于HALCON讲解。
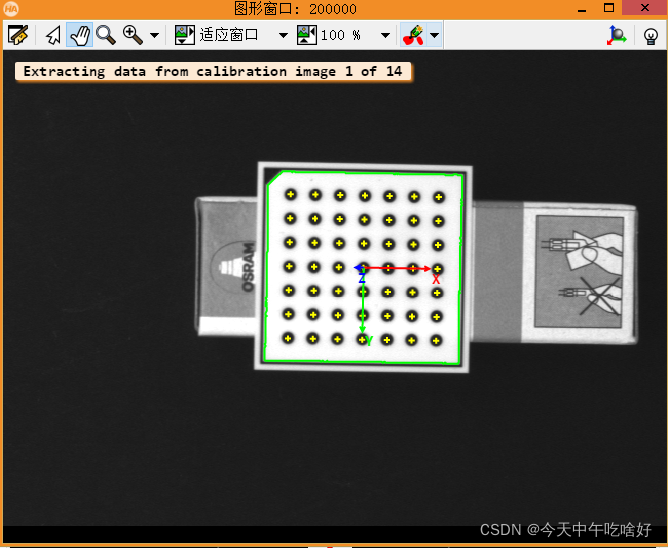
*****calibrate_hand_eye_scara_moving_cam.hdev ************scara关节机器人眼在手上的手眼标定例程******** This example explains how to perform the hand-eye calibration for* a SCARA robot. In this case, ...
* * This example explains how to use the hand eye calibration for the case where* the camera is attached to the robot tool and the calibration object* is stationary with respect to the robot....


从Halcon视频中总结的手眼标定详细过程 一 标定板描述文件准备和14张以上有标定板的图像和每张图像对应的机器人位姿 标定板描述文件加载 读取相机内部参数 创建手眼标定模型 对手眼标定模型...
* This example explains how to perform the hand-eye calibration for * a SCARA robot. In this case, the camera is stationary with respect * to the robot and observes the workspace of the robot....
Halcon标定系列 Halcon标定系列(1):实现机械手手眼标定项目介绍、9点标定 Halcon 手眼标定1.简单的9点标定 halcon第二十四讲:手眼标定基本原理
做机器人视觉的同行们,在用Halcon12做手眼标定的时候,尤其对那些刚开始做标定的人,应该会对Halcon12例程中的手眼标定程序中读取图片找不到标定板,或找到了标定板却找不准标定板上圆的位置而感到苦恼。...
最近在做的项目有用到手眼标定,是关于两个康耐视工业相机和爱普生SCARA机器人之间的手眼标定,相机是固定安装,属于Eye-to-hand固定方式。考虑到halcon中用于标定的算子和实例都比较丰富,并且halcon作为一款商用的...
halcon的手眼标定是有例程的,我用的是手被固定在眼外。 首先是准备一块halcon的标定板,固定在ABB的法兰盘工具处,手动控制机械臂移动。 每固定一次,拍摄图片,记录当前机械臂姿态。记录姿态用:hand_eye_robot_...
*此示例说明如何为 SCARA机器人执行手眼校准。在这种情况下,相机相对于 机器人静止并观察机器人的工作空间。的 *校准板附接至所述机器人的...*该例程说明了怎样给SCARA机器人做手眼标定。这种情况下,相机相对与...


*****calibrate_hand_eye_scara_...scara关节机器人眼在手上的手眼标定例程** This example explains how to perform the hand-eye calibration for a SCARA robot. In this case, the camera is attached to ...


手眼标定 标定是机器人视觉中非常重要的一步,可以帮助机器人转换识别到的视觉信息,从而完成后续的控制工作,例如视觉抓取等等 提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录手眼...

Halcon之根据SCARA手眼校准来执行拾取和放置 这个示例展示了如何使用SCARA机器人根据SCARA手眼校准确定的校准信息来执行拾取和放置应用程序。其主要分为两个部分: 一是利用模型图像来定义目标的形状; 二是根据形状...
*Scara与普通的机械手没什么大区别,注意一点是标定平面与实际产品平面差值,或者干脆把Z方向数值去掉,让机械手那边设置抓取高度,视觉这边只识别位置 *******************普通机械手 眼在手上********************...
推荐文章
- c语言课程图书信息管理系统,c语言课程设图书信息管理系统.doc-程序员宅基地
- webpack4脚手架搭建1——打包并编译es6_webpack编译es6语法打包-程序员宅基地
- 信息通信服务、电子商务及物流服务的创新与发展_信息通信,电子商务-程序员宅基地
- websocket.js的封装,包含保活机制,通用_websocket保活-程序员宅基地
- Ubuntu安装conda-程序员宅基地
- LoadRunner性能测试关注指标及结果分析_loadrunner性能指标分析-程序员宅基地
- java怎么做图形界面_java怎么做图形界面?实例分享-程序员宅基地
- eMMC常识性介绍N_emmc温升系数-程序员宅基地
- MATLAB算法实战应用案例精讲-【人工智能】机器视觉(概念篇)(最终篇)-程序员宅基地
- Mac电脑如何串流游戏 Mac上的CrossOver是串流游戏吗 串流游戏是什么意思 串流游戏怎么玩 Mac电脑怎么玩Steam游戏_macos steam和crossover steam区别-程序员宅基地